> 健康
点云滤波方法(cloudcompae点云滤波)
导语:「技术控」基础向:点云数据处理之滤波(二)
前半部分:「技术控」基础向:点云数据处理之滤波(一)
4. 统计滤波
定义一个点云密度阈值,小于这个值点云筛除。
(操作方法是:计算点云中点到最近K个点的平均距离,应该构成高斯分布,根据给定均值和方差筛除方差之外的点。)
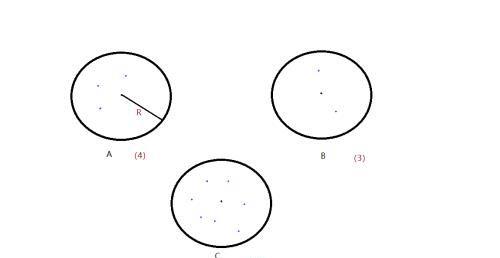
5. 半径滤波
半径滤波
半径滤波是统计滤波的一种,对点云中的点指定(圆的半径以及其中点的数量)。圆中点的数量少于阈值时圆心点被筛除。
设置半径为R,圆中点的数量为n;对于上图,n设置为4,则圆AB中的圆心点被筛除,圆C的圆心点留下。
6. 高斯滤波
对整个点云进行加权平均。每一个点的值,都由其本身和邻域内其他点值经过加权平均后得到(对领域线性卷积)。是线性平滑滤波,用于消除噪声。
7. 双边滤波
高斯滤波只考虑了空间域spatialdomain S,即位置/距离对点的影响。
双边滤波在高斯滤波空间域上还考虑了像素范围域range domain R(像素值如颜色强度和深度)。比高斯滤波多了一个高斯方差sigma-d,双边滤波是基于空间分布的高斯滤波函数。是非线性平滑滤波,用于降噪平滑,保持边缘。
(本文只是对一些常用的滤波方法进行原理介绍和浅析,具体实现和实例将于另外对应的滤波方法帖中进行描述。)
本文内容由小里整理编辑!